SeaFlight Underwater Glider
The SeaFlight Glider is an open-source glider designed to fit the needs of the scientific community to be robust, easy to repair and refurbish, and made from off-the-shelf or easily machined parts.
Recent global warming forecasts for coastal ecosystems include deleterious increases in marine heatwaves and higher volumes of coastal freshwater runoff laden with pollutants and sediment. Monitoring these trends will be vital for coastal communities.
Emerging global networks of autonomous robots that sample upper ocean properties are concentrated near 1st world coastal regions but cover only a fraction of global coastal ecosystems. One path to close this gap is through open-source development of profiling robots that are lower cost, simpler to build and operate, and deployed in greater numbers anywhere.
Over the last decade of global warming, marine heatwaves have doubled in frequency and increases in tropical cyclone winds and rainfall have amplified freshwater runoff flooding into coastal ecosystems laden with sediment and contaminants. Almost 11% of the global population – 896 million people – live within the coastal zone and face escalating climate compounded risks, including sea level rise and degradation of coastal ecosystems [1]. Response to such extreme change requires broader ocean observing networks, including broader collection of basic vertical profiles of physical, chemical, and biological ocean properties. Yet, globally, the current capacity to collect ocean profiles remains far too low.
Emerging global networks of autonomous profiling robots are concentrated in the United States and western Europe (1st world nations) and cover only a small fraction of global coastal ecosystems [2]. Expanding coastal networks to support global monitoring, forecasting, and mitigation of future extreme events requires profiling robots that are lower cost, simpler to fabricate, and easier to operate and maintain. The open-source revolution that transformed software development in the previous decade is already accelerating development of robust, locally manufactured, repairable, and less-costly vehicles and sensors.
This proposal is to invest in the continued design, construction and testing of an autonomous underwater glider that will help expand coastal observation networks, wherever they are needed. The SeaFlight Glider is our open source underwater AUV designed for greater durability, operability, repairability and lower cost. The SeaFlight Glider was the winning product at the 2019 WHOI Pitchathon and awarded a 2-year $100k Technical Innovation Award in 2021. The project was presented at the 2021 National Academy of Sciences Ocean Shots in February 2021.
Existing partners in this effort currently include volunteers from WHOI (primarily AOPE), Oregon State University, and Falmouth High School. This team represents the kernel of an open source community building the SeaFlight Glider design. The current design employs universally available and low-cost mechanical components, flexible micro-electronics built for mobility applications, architecture for both research-grade and open-source science sensors, and open-source software libraries for command, communication, navigation, and data logging.
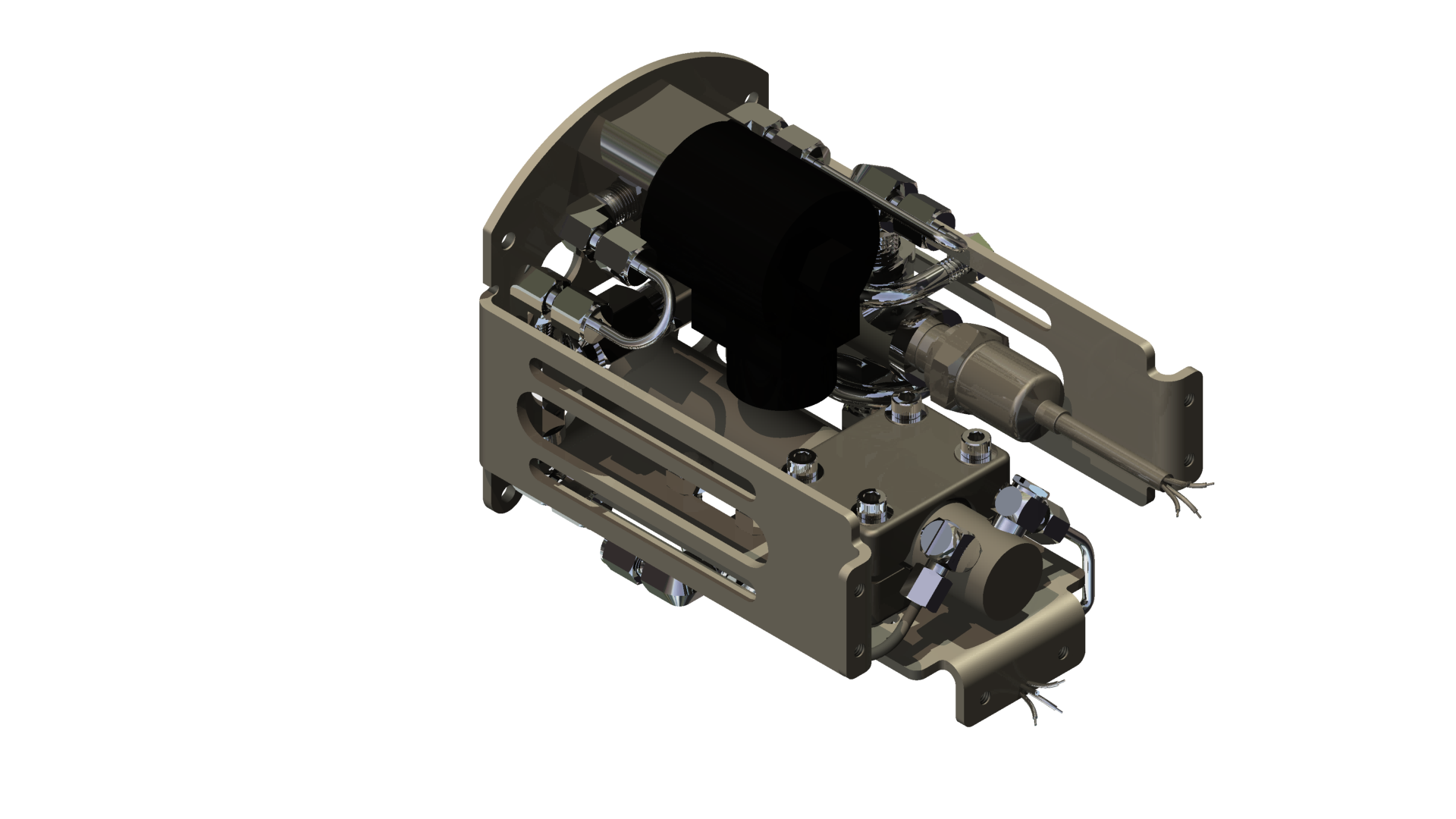
Prototyping of the closed-cycle hydraulic buoyancy engine was accelerated using common, internationally standardized components, open-source control electronics, and was completed in < 500 person-hr. The electronics PCB’s (Printed Circuit Board) are designed, fabricated and currently being assembled into the buoyancy engine with the embedded software for all sensors and engine control interfaces. The complete assembly has achieved benchtop operation and assembly of electronics and engine mechanicals will be finalized for tank tests in May 2022. The exterior housing design is complete and will be fabricated in July 2022. By Fall 2022 we hope to complete a sequence of tank and open-water testing to verify full function of the engine, control electronics, and sampling capability using low-cost sensors, culminating in open ocean test deployment. This version 1.0 design and ongoing developments are shared with the wider community through Github [3].
The goal at the end of 2022 would be final development and release of version 2.0, a finished and field-proven glider design. The final design will be able to carry, power, and operate a suite of ocean sensors for 3+months diving to 200 meter depths in the ocean. Our project seeks to incorporate open-source elements at every level. However, data quality remains paramount to project sucess and adoption by the community. Ocean sensors for potential integration would be sourced from proven industry-standard suppliers [4], sensors arising from development by existing WHOI partnerships [5], as well as the growing ecosystem of novel open-source designs for low-cost physical and optical water properties [6, 7].

Falmouth High School students are currently helping to develop the version 1.0 engine interface module, while learning about open-source practices, embedded software and code-design. The glider attitude- and steering-control is modular and will be thruster-capable via “snap-on” external modules. We have received approval for lab space in the WHOI AVAST facility where we also plan to employ local Falmouth High Schools students in the design and testing of version 2.0
We anticipate a full public release of version 2.0 of the SeaFlight Glider, complete with a bill of materials, design specifications and drawings, software, and open-source CAD files to support fabrication -- complete plans to fabricate and operate the glider. With version 2.0 release, and with broader community engagement and adoption, we hope to see others improve and scale the design. Ideas already under consideration include paired buoyancy engines for redundancy and pitch control, solar charging, and networking multiple units for fleet coordination.
Secondary outcomes of this proposed project will be for WHOI to establish a systematic development path for open-source ocean robotic projects, to build partnerships and provide leadership on best-practices for open-source software and hardware development. Our primary goal is a fully operable open-source glider that can be more freely adopted, maintained and improved, available for use by institutions, governments, and coastal communities to measure, monitor, and mitigate future coastal ocean health and hazards.
We are looking for volunteers to help! Please contact jreine aat whoi.edu
[1] IPCC 6th Assessment Special Report on the Ocean and Cryosphere in a Changing Climate, 2019.
[2] BOON: A BOUNDARY OCEAN OBSERVING NETWORK
[6] CTDizzle
[7] Open CTD